 Eseandre Mordi
Eseandre Mordi
⬤ Researchers have introduced Kinema4D, an action-conditioned 4D generative robotic simulator that separates precise kinematic control from environmental dynamics. Reported by DailyPapers, the system enables physically plausible simulation of complex robot-world interactions by modeling motion and environment as distinct but coordinated processes.
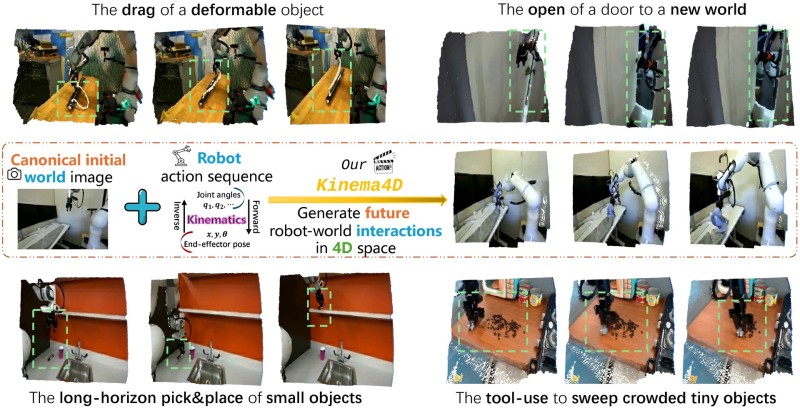
⬤ The framework generates future robot-world interactions across spatial and temporal dimensions. It decouples robot motion (joint angles, end-effector positioning) from environmental responses, allowing more accurate real-world physics modeling. Demonstrated tasks include deformable object manipulation, door opening, and long-horizon pick-and-place operations - scenarios demanding high interaction consistency.
⬤ Kinema4D also handles tool-use tasks - such as sweeping clustered small objects - highlighting its value for multi-step robotic workflows. To support training at scale, the team released Robo4D-200k, a large-scale dataset covering varied robotic tasks. This enables high-fidelity simulation and opens the door to zero-shot generalization across unseen environments.
⬤ The release reflects a broader push in AI-driven robotics to close the gap between simulated training and real-world deployment. Advances in 4D modeling could meaningfully accelerate automation, embodied AI research, and complex task execution in industrial and service robotics environments.
 Eseandre Mordi
Eseandre Mordi


