 Peter Smith
Peter Smith

⬤ Researchers from The Chinese University of Hong Kong, Shenzhen have proposed GS-World, a new learning paradigm for advancing embodied AI through large-scale generative simulation. The framework trains AI-powered robots inside realistic, physics-based virtual environments rather than relying on real-world data collection.
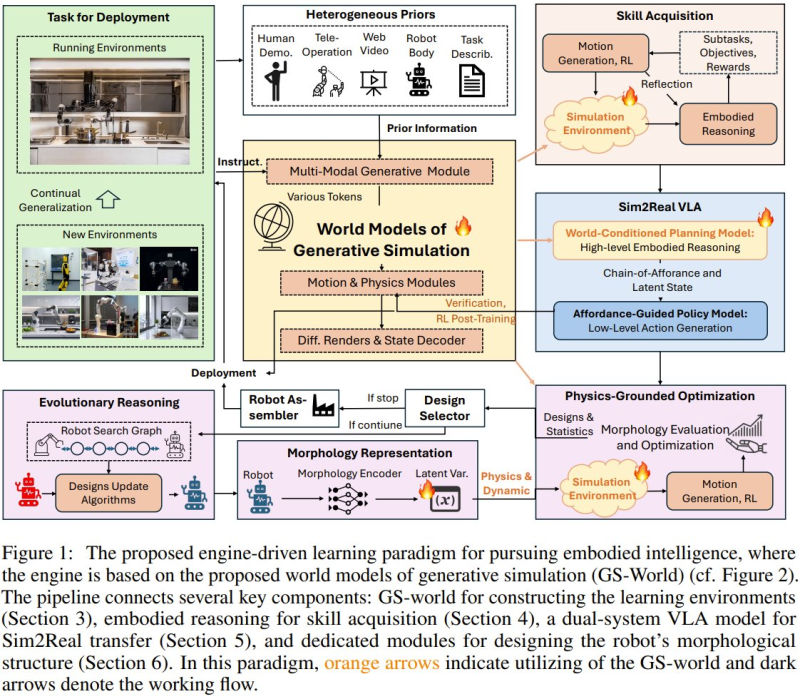
⬤ GS-World uses world models that automatically generate diverse objects, environments, and physical dynamics needed for robot learning. The system connects multimodal generative modules, motion and physics modeling, simulation environments, and skill acquisition pipelines into one unified workflow.
⬤ The framework improves training efficiency by reducing dependence on manual demonstrations and expensive physical experiments. Through simulation-based task deployment, skill learning, and sim-to-real transfer, it enables continual generalization across new environments while using reinforcement learning and physics optimization to refine robot behavior before deployment.
⬤ The proposal reflects a broader shift toward simulation-centric development in robotics. High-fidelity generative simulation is becoming essential for scalable embodied AI, enabling faster iteration and more robust real-world performance as robotics research expands.
 Peter Smith
Peter Smith


