 Alex Dudov
Alex Dudov

⬤ A team from Peking University and the University of California, Merced has developed KnowVal, a self-driving system that goes beyond simple pattern recognition. Unlike conventional approaches, KnowVal actively retrieves and applies real-world knowledge—including traffic laws and safety principles—to make driving decisions that align with human values and ethical considerations.
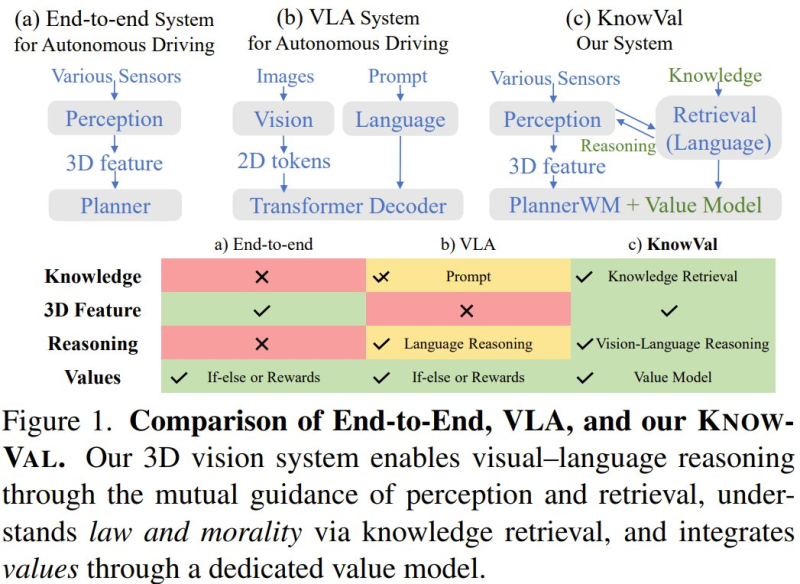
⬤ The system works by combining several key elements: sensors feed data into a perception module that creates 3D environmental features, which then flow into a planning module equipped with both a world model and a value model. At the same time, a knowledge retrieval component pulls in relevant information like legal requirements and safety constraints right when decisions are being made. This stands apart from traditional systems that operate without explicit knowledge access, and from vision-language models that rely mainly on prompts without structured 3D understanding.
⬤ Testing shows KnowVal delivers real improvements in safety. The system recorded the lowest collision rate on the nuScenes benchmark and set new performance records on Bench2Drive—both industry-standard tests for evaluating self-driving systems in challenging conditions. The results confirm that combining knowledge retrieval with value-guided planning significantly reduces unsafe behaviors in complex driving situations.
⬤ What makes KnowVal particularly significant is how it rethinks the future of autonomous vehicles. By weaving together perception, reasoning, knowledge, and ethical values into one framework, it brings self-driving systems closer to how humans actually make decisions on the road. Instead of treating safety and ethics as afterthoughts, KnowVal builds them directly into the planning process—pointing toward a future where autonomous vehicles are not just smarter, but more interpretable, reliable, and aligned with societal expectations.
 Alex Dudov
Alex Dudov


